

Roboty ogólnego przeznaczenia coraz bliżej
Startup Generalist AI pokazał robota, który samodzielnie radzi sobie z realnymi zadaniami — i robi to z zadziwiającą precyzją.


Zespół inżynierów związanych wcześniej z OpenAI, DeepMind i Boston Dynamics zaprezentował pierwsze efekty pracy swojego nowego start-upu Generalist AI. Firma jest wspierana przez znanych inwestorów, w tym NVIDIA i Jeffa Bezosa (Bezos Expeditions).
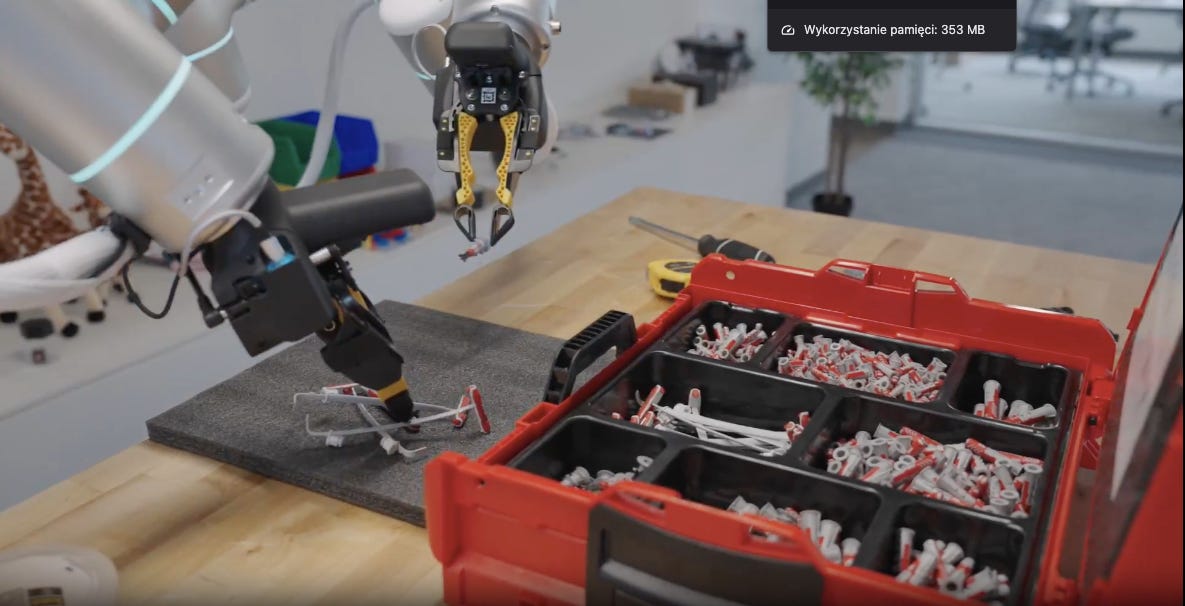
Celem projektu są roboty ogólnego przeznaczenia (eng. general-purpose robots), które potrafią autonomicznie wykonywać zróżnicowane zadania w dynamicznych, nieprzewidywalnych środowiskach. W opublikowanym materiale wideo widać robota, który działa całkowicie samodzielnie — rozpoznaje obiekty, planuje ruchy, koordynuje obie ręce i precyzyjnie manipuluje przedmiotami. Wśród zademonstrowanych zadań znalazły się m.in. sortowanie drobnych elementów z bałaganu i umieszczanie ich we właściwych przegródkach, składanie i pakowanie pudełek wraz z elastycznym łańcuchem rowerowym, rozmontowywanie konstrukcji z klocków LEGO, a następnie wrzucanie ich do odpowiednich pojemników. Samo to robi wrażenie, ale sposób, w jaki osiągnięto ten poziom sprawności, jest równie imponujący.
Cały system opiera się na pojedynczej sieci neuronowej typu end-to-end, która podczas treningu samodzielnie nauczyła się interpretować złożone dane sensoryczne — od obrazu z kamer, przez sygnały z czujników siły i momentu obrotowego w przegubach, po informacje o położeniu ramion. Model sam wykształcił wewnętrzne reprezentacje świata fizycznego i nauczył się, które cechy są istotne do wykonania określonego zadania. Wszystkie obserwowane umiejętności to emergentne właściwości wynikające właśnie z tego procesu uczenia. Na wyjściu zaś otrzymujemy bezpośrednie sygnały sterujące, wydawane z częstotliwością 100 Hz – 100 razy na sekundę! Co istotne, system może działać na różnych typach ramion robotycznych o wielu stopniach swobody (np. UR5, Flexiv Rizon 4) i przenosić nabyte umiejętności do nowych środowisk bez konieczności ponownego szkolenia. Dzieje się tak dlatego, że model był trenowany na bardzo zróżnicowanym zestawie danych pochodzących z różnych robotów operujących w różnorodnych środowiskach i wykonujących różne typy zadań. W efekcie robot uczy się ogólnych zasad manipulacji obiektami, a nie tylko specyficznych ruchów dla konkretnej maszyny. Pierwsze wyniki pokazują, że takie rozwiązania mogą zbliżać nas do robotów, które nie tylko wykonują powtarzalne ruchy w fabryce, ale też potrafią adaptować się do złożonych zadań w realnym świecie.